OSWaldito
Escrito por: Ulises Gascón
Nov 20, 2016 — 2 min read

Objetivo
Robot Open Source que utilizamos en OSWeekends para gestionar redes sociales, telepresencia, etc....


Stack
Sistema Operativo
Servidor
Cliente
Funcionalidades

Robótica
- Desplazamiento con WebSocket
- Simulación de VR en Cliente
- Simulación de voz en Cliente (parcial - En desarrollo)
- WebCam Stream frame a frame
Comunicación
- Escucha activamente ciertos hashtags de Twitter.
- Escucha activamente conversaciones en Google Hangouts
- Envia mensajes en Google Hangouts
- Envia mensajes en Slack
- Envia mensajes al azar clasificados por prioridad en Slack
- Envia mensajes de Error y estado al administrador en Goolgle Hangouts
- Puede ser desplegado en multiples entornos (Raspbian, Linux, OSX, Windows, C9...)
- Permite desplegar multiples avatares y personalidades desde la configuración para comunicarse en Slack
Hardware
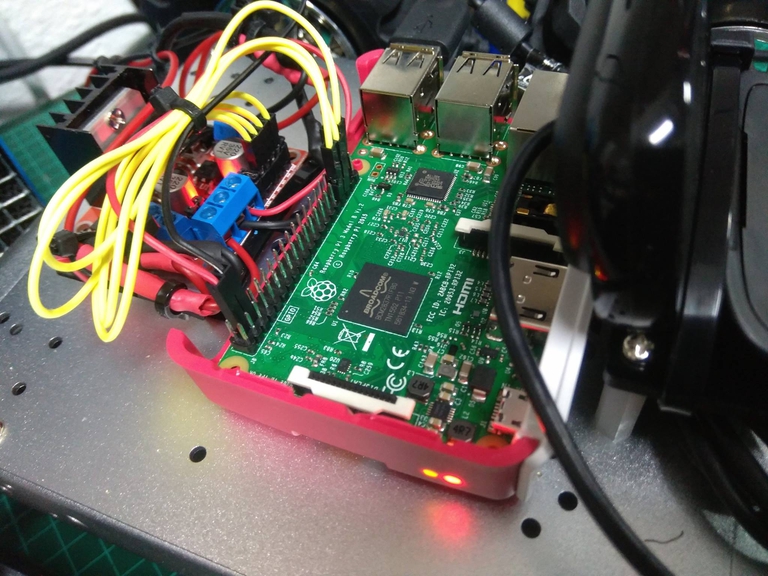
Componentes
- Raspberry Pi 3 modelo B
- Pantalla - SunFounder 7" HD 1024*600 TFT LCD
- Chasis Robótico - ALSRobot 4WD Aluminum Mobile Robot Platform (Car)
- WebCam - Logitech C525
- Puente H - Módulo L298N doble puente H DC Stepper para Arduino
Caja de transporte


Estado
Este proyecto esta completado